Pallet Detection
Traditional AGV Pallet Pick-up
The traditional process for an AGV to pick up a pallet includes the assignment of the target pallet and providing its precise location to the AGV. The assignment is either predefined into the AGV navigation stack or provided by a supervisory system/fleet manager. The AGV would navigate to the predefined location where the target pallet should be.
For this to work, the traditional approach for an AGV would require a well-defined, static environment including precisely staged pallets and pallet locations by e.g., rigidly constraining the pallet location via infrastructural changes. Based on predefined heuristics, the AGV will drive toward the pallet and attempt the pallet pick-up.
In case of misaligned pallets, or any other disturbances in the process, the attempt might fail and, because of that, cause the logistical process to stop. The AGV needs to wait for human intervention to solve the problem. Interventions will negatively impact the efficiency of the process.
AIIM Pallet Detection
To prevent the need for human interventions on automated logistical processes in increasingly complex, dynamically changing environments, the next-generation AMRs need the capabilities to solve problems caused by (external) disturbances. In case of any unexpected change in the environment (e.g., a pallet misalignment), AIIM pallet detection enables the AMR to understand the scene and solve the problem.
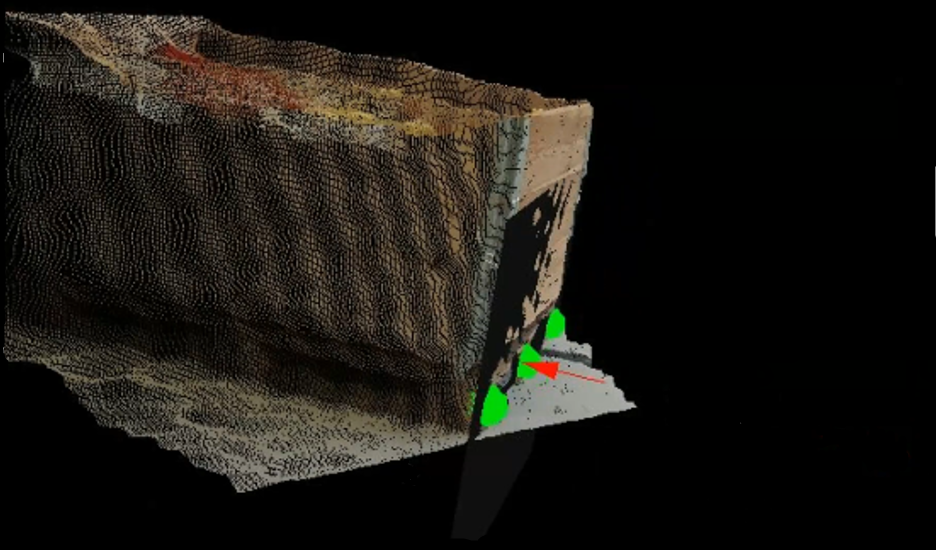
While moving toward the expected pallet location, our pallet detection solution can detect pallets and provide a per-frame output of the relative pose of the pallet with respect to the AMR. This data can be used by the AMR navigation stack to verify the pallet position is in place before the AMR attempts the pick-up.
In case of pallet misalignment, the AMR will receive the updated location and is able to learn and adapt to the change. Ultimately, an AMR equipped with AIIM pallet detection capabilities will no longer need to stop and wait for human intervention but instead solves the problem, learn and adapt to the change in environment, and provide the most flexible and efficient solution around the pallet pick-up manoeuvre.
Specifications
- Pose estimation:
- Pose accuracy: <1cm at 1.5 meters distance
- Pose accuracy: <5cm at 2.0 meters (per-frame pose estimation dynamically while moving from 5 to 2 meters distance)
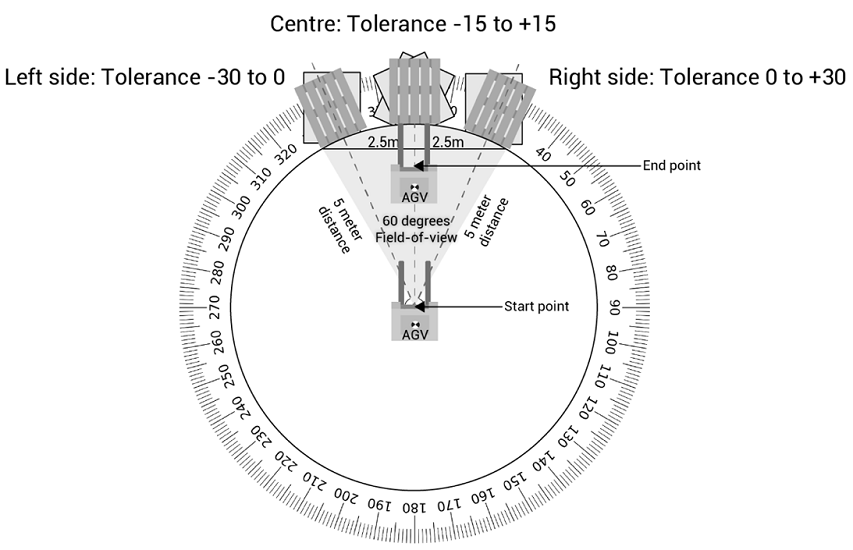
- Minimum distance: <1.4 meters
- Maximum distance: 5 meters
- Center front face of the pallet must be within 60 degrees Field of View
- 15 degrees center tolerance w.r.t. the line that connects the sensor and pallet (i.e., 30 degrees variation)
- System response time: 100 ms
- Minimum required spacing between pallets: 0.1 meters